Четвороножни или квадрупедни роботи имају корисне карактеристике, укључујући способност брзог хода на незгодним теренима и одржање ниског центра гравитације.

Неки роботи са четири ноге могу и да баратају предметима у свом окружењу, а то се обично постиже помоћу структура налик руци постављеним на врх робота, умјесто удовима који се користе за ходање.
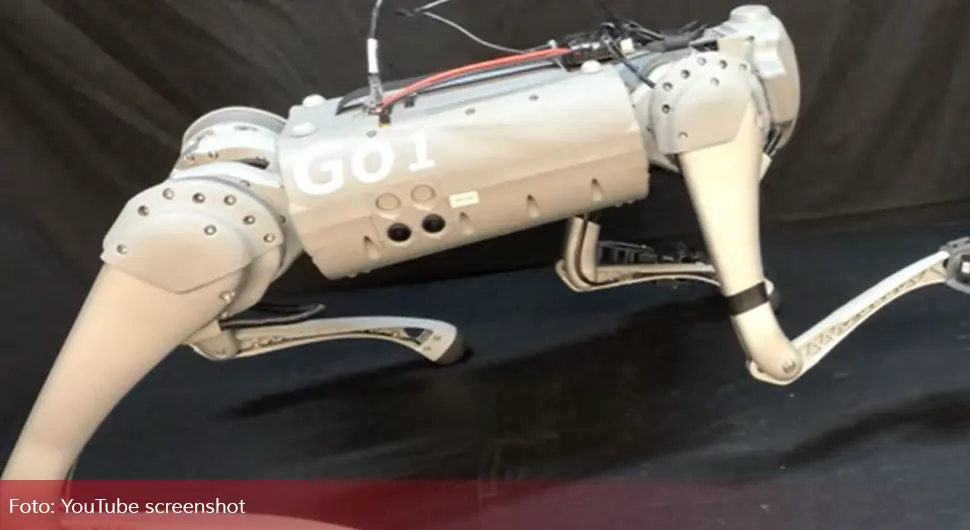
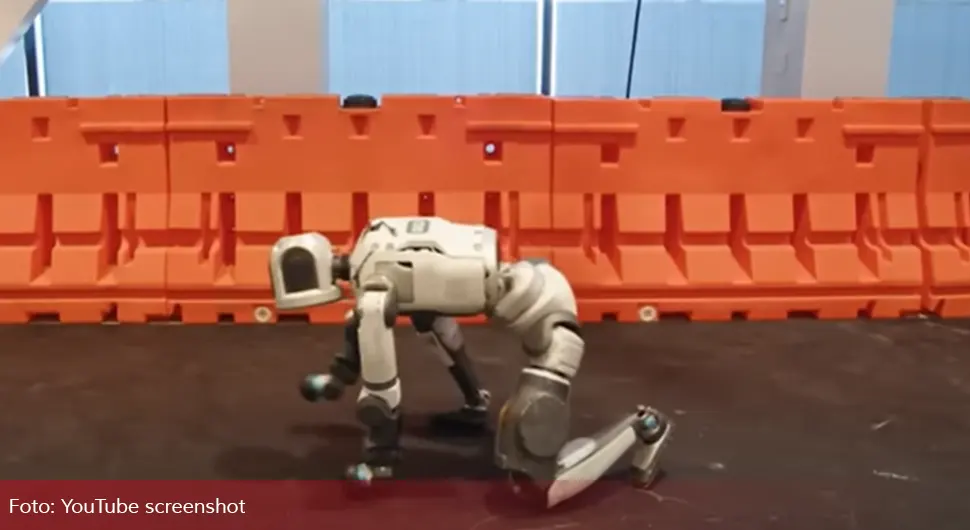
Истраживачи са Универзитета Карнеги Мелон, Вашингтонског универзитета и из Гугла су недавно развили иновативног квадрупедног робота који може да барата оближњим предметима помоћу ногу које користи за ходање. Овај роботски систем се показао као врло спретан и вишестран, успјешно обављајући широк спектар задатака, пише "TechHplore".
Квадрупедни роботи су вишестрани инструменти способни за кретање и операције у сложеним срединама.
Традиционални дизајни обично укључују руке постављене на врх ради функција манипулације.
Међутим, такве конфигурације могу да ограниче носивост, стабилност и ефикасност робота.
У природи не видимо пса са руком на леђима, каже професор Динг Џао из Лабораторије за АИ Универзитета Карнеги Мелон.
Нови робот, Локомен, има специјалну морфологију која му омогућава прилагођавање аранжмана удова тако да може да барата предметима на различите начине.
Битна компонента је локоманипулатор, новоразвијени, прилагодљиви, јефтини и модуларни манипулатор са 3-ДоФ. Локоманипулатор је прилично лако произвести и стога би могао бити нашироко примијењен. Истраживачи су инкорпорирали два локоманипулатора на предње поткољенице робота, омогућавајући да такође функционишу као руке.
Осим што није скуп и што је компактан, Локомен може да обавља задатке сложеног баратања предметима, укључујући отварање врата, укључивање електричних уређаја у утичницу и хватање предмета у малим просторима.
Научници планирају да унаприједе способности робота помоћу најразвијенијег компјутерског вида и алгоритама машинског учења. Интеграција визуелно-језичких модела ће битно измијенити начин на који Локомен изводи акције.
То би могло бити постигнуто интерпретацијом визуелне перцепције окружења и процесуирањем вербалних инструкција добијених од људи, омогућавајући интуитивнију и савршенију интеракцију, каже Џао.

.webp)